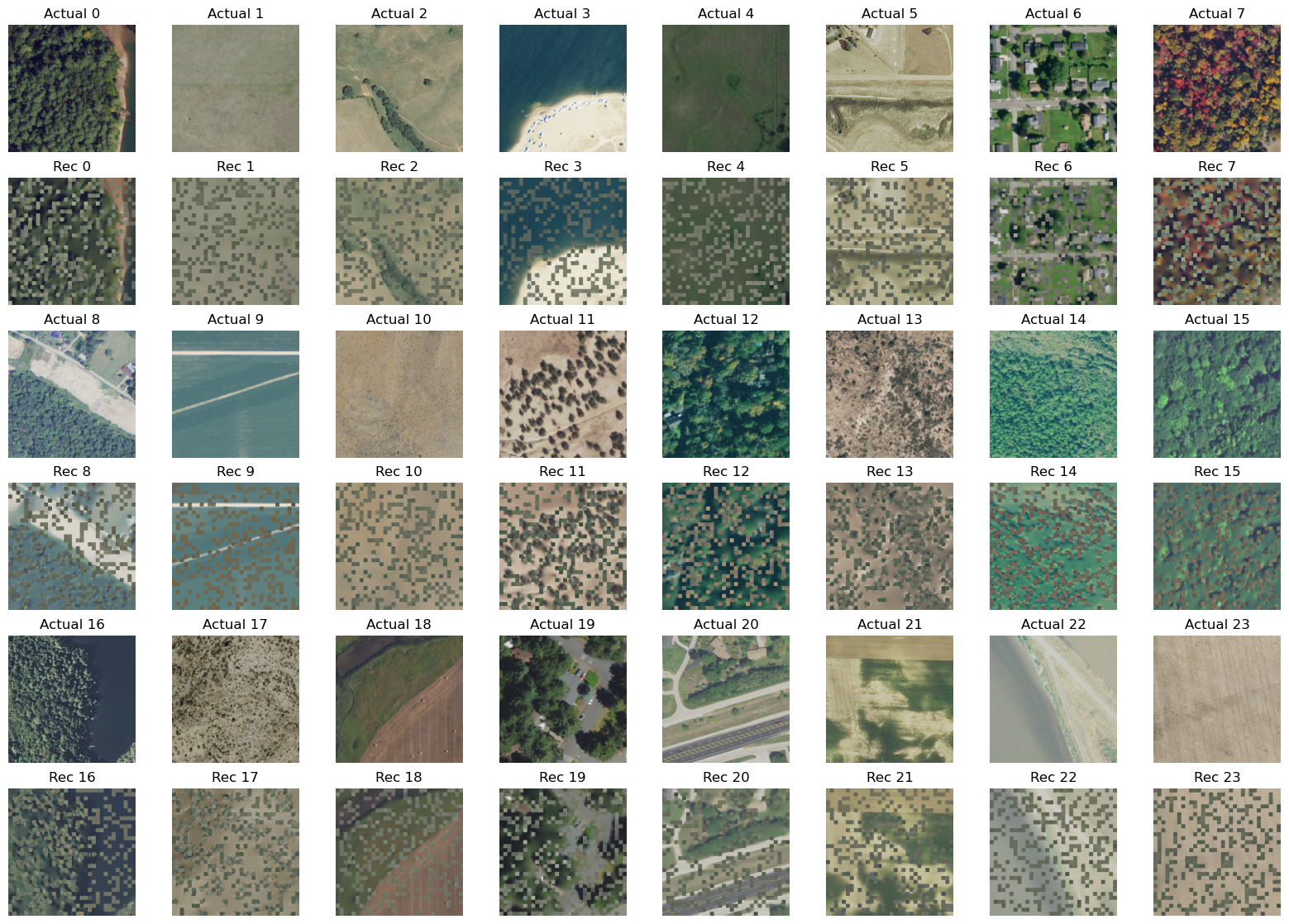
Let us visualize how Clay reconstructs each sensor from 70% masked inputs#
import sys
import warnings
sys.path.append("../..")
warnings.filterwarnings(action="ignore")
import matplotlib.pyplot as plt
import numpy as np
import torch
from einops import rearrange
from claymodel.datamodule import ClayDataModule
from claymodel.module import ClayMAEModule
DATA_DIR = "/home/ubuntu/data"
CHECKPOINT_PATH = "../../checkpoints/clay-v1.5.ckpt"
METADATA_PATH = "../../configs/metadata.yaml"
CHIP_SIZE = 256
DEVICE = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
MASK_RATIO = 0.7 # 70% masking of inputs
MODEL#
Load the model with best checkpoint path and set it in eval mode. Set mask_ratio to 70% & shuffle to True.
module = ClayMAEModule.load_from_checkpoint(
checkpoint_path=CHECKPOINT_PATH,
model_size="large",
metadata_path="../../configs/metadata.yaml",
dolls=[16, 32, 64, 128, 256, 768, 1024],
doll_weights=[1, 1, 1, 1, 1, 1, 1],
mask_ratio=0.7,
shuffle=True,
)
module.eval();
Distributed Setup#
import os
import torch.distributed as dist
if not dist.is_initialized():
os.environ["MASTER_ADDR"] = "localhost"
os.environ["MASTER_PORT"] = "12355" # Can be any free port
dist.init_process_group("nccl", rank=0, world_size=1)
DATAMODULE#
Load the ClayDataModule
# For model training, we stack chips from one sensor into batches of size 128.
# This reduces the num_workers we need to load the batches and speeds up the
# training process. Here, although the batch size is 1, the data module reads
# batch of size 128.
dm = ClayDataModule(
data_dir=DATA_DIR,
metadata_path=METADATA_PATH,
size=CHIP_SIZE,
batch_size=1,
num_workers=1,
)
dm.setup(stage="fit")
Total number of chips: 258
Let us look at the data directory.
We have a folder for each sensor, i.e:
Landsat l1
Landsat l2
Sentinel 1 rtc
Sentinel 2 l2a
Naip
Linz
Modis
And, under each folder, we have stacks of chips as .npz files.
!tree -L 1 {DATA_DIR}
/home/ubuntu/data
├── landsat-c2l1
├── landsat-c2l2-sr
├── linz
├── modis
├── naip
├── sentinel-1-rtc
└── sentinel-2-l2a
7 directories, 0 files
!tree -L 2 {DATA_DIR}/naip | head -5
/home/ubuntu/data/naip
├── cube_10.npz
├── cube_100045.npz
├── cube_100046.npz
├── cube_100072.npz
Now, lets look at what we have in each of the .npz files.
sample = np.load("/home/ubuntu/data/naip/cube_10.npz")
sample.keys()
KeysView(NpzFile '/home/ubuntu/data/naip/cube_10.npz' with keys: pixels, lon_norm, lat_norm, week_norm, hour_norm)
sample["pixels"].shape
(128, 4, 256, 256)
sample["lat_norm"].shape, sample["lon_norm"].shape
((128, 2), (128, 2))
sample["week_norm"].shape, sample["hour_norm"].shape
((128, 2), (128, 2))
As we see above, chips are stacked in batches of size 128.
The sample we are looking at is from NAIP so it has 4 bands & of size 256 x 256.
We also get normalized lat/lon & timestep (hour/week) information that is *(optionally required) by the model. If you don’t have this handy, feel free to pass zero tensors in their place.
Load a batch of data from ClayDataModule
ClayDataModule is designed to fetch random batches of data from different sensors sequentially, i.e batches are in ascending order of their directory - Landsat 1, Landsat 2, LINZ, NAIP, MODIS, Sentinel 1 rtc, Sentinel 2 L2A and it repeats after that.
# We have a random sample subset of the data, so it's
# okay to use either the train or val dataloader.
dl = iter(dm.train_dataloader())
l1 = next(dl)
l2 = next(dl)
linz = next(dl)
modis = next(dl)
naip = next(dl)
s1 = next(dl)
s2 = next(dl)
for sensor, chips in zip(
("l1", "l2", "linz", "modis", "naip", "s1", "s2"),
(l1, l2, linz, modis, naip, s1, s2),
):
print(
f"{chips['platform'][0]:<15}",
chips["pixels"].shape,
chips["time"].shape,
chips["latlon"].shape,
)
landsat-c2l1 torch.Size([128, 6, 256, 256]) torch.Size([128, 4]) torch.Size([128, 4])
landsat-c2l2-sr torch.Size([128, 6, 256, 256]) torch.Size([128, 4]) torch.Size([128, 4])
linz torch.Size([128, 3, 256, 256]) torch.Size([128, 4]) torch.Size([128, 4])
modis torch.Size([128, 7, 256, 256]) torch.Size([128, 4]) torch.Size([128, 4])
naip torch.Size([128, 4, 256, 256]) torch.Size([128, 4]) torch.Size([128, 4])
sentinel-1-rtc torch.Size([128, 2, 256, 256]) torch.Size([128, 4]) torch.Size([128, 4])
sentinel-2-l2a torch.Size([128, 10, 256, 256]) torch.Size([128, 4]) torch.Size([128, 4])
INPUT#
Model expects a dictionary with keys:
pixels:
batch x band x height x width- normalized chips of a sensortime:
batch x 4- horizontally stackedweek_norm&hour_normlatlon:
batch x 4- horizontally stackedlat_norm&lon_normwaves:
list[:band]- wavelengths of each band of the sensor from themetadata.yamlfilegsd:
scalar- gsd of the sensor frommetadata.yamlfile
Normalization & stacking is taken care of by the ClayDataModule: Clay-foundation/model
When not using the ClayDataModule, make sure you normalize the chips & pass all items for the model.
def create_batch(chips, wavelengths, gsd, device):
batch = {}
batch["pixels"] = chips["pixels"].to(device)
batch["time"] = chips["time"].to(device)
batch["latlon"] = chips["latlon"].to(device)
batch["waves"] = torch.tensor(wavelengths)
batch["gsd"] = torch.tensor(gsd)
return batch
FORWARD PASS#
Pass a batch from single sensor through the Encoder & Decoder of Clay.
# Let us see an example of what input looks like for NAIP
platform = "naip"
metadata = dm.metadata[platform]
wavelengths = list(metadata.bands.wavelength.values())
gsd = metadata.gsd
batch_naip = create_batch(naip, wavelengths, gsd, DEVICE)
with torch.no_grad():
unmsk_patch, unmsk_idx, msk_idx, msk_matrix = module.model.encoder(batch_naip)
pixels_naip, _ = module.model.decoder(
unmsk_patch,
unmsk_idx,
msk_idx,
msk_matrix,
batch_naip["time"],
batch_naip["latlon"],
batch_naip["gsd"],
batch_naip["waves"],
)
def denormalize_images(normalized_images, means, stds):
means = np.array(means)
stds = np.array(stds)
means = means.reshape(1, -1, 1, 1)
stds = stds.reshape(1, -1, 1, 1)
denormalized_images = normalized_images * stds + means
return denormalized_images
naip_mean = list(metadata.bands.mean.values())
naip_std = list(metadata.bands.std.values())
batch_naip_pixels = batch_naip["pixels"].detach().cpu().numpy()
batch_naip_pixels = denormalize_images(batch_naip_pixels, naip_mean, naip_std)
batch_naip_pixels = batch_naip_pixels.astype(np.uint8)
Rearrange the patches from the decoder back into pixel space.
Output from Clay decoder is of shape: batch x patches x pixel_values_per_patch, we will reshape that to batch x channel x height x width
pixels_naip = rearrange(
pixels_naip,
"b (h w) (c p1 p2) -> b c (h p1) (w p2)",
c=batch_naip_pixels.shape[1],
h=32,
w=32,
p1=8,
p2=8,
)
denorm_pixels_naip = denormalize_images(
pixels_naip.cpu().detach().numpy(), naip_mean, naip_std
)
denorm_pixels_naip = denorm_pixels_naip.astype(np.uint8)
fig, axs = plt.subplots(6, 8, figsize=(20, 14))
for i in range(0, 6, 2):
for j in range(8):
idx = (i // 2) * 8 + j
axs[i][j].imshow(batch_naip_pixels[idx, [0, 1, 2], ...].transpose(1, 2, 0))
axs[i][j].set_axis_off()
axs[i][j].set_title(f"Actual {idx}")
axs[i + 1][j].imshow(denorm_pixels_naip[idx, [0, 1, 2], ...].transpose(1, 2, 0))
axs[i + 1][j].set_axis_off()
axs[i + 1][j].set_title(f"Rec {idx}")
Next steps#
Look at reconstructions from other sensors
Interpolate between embedding spaces & reconstruct images from there (create a video animation)